
摄像机反求模块详解
概览
Camera Solve模块用于将获取平面跟踪信息转换为三维空间信息。
如果你不能在你需要的平面上获得一个良好的追踪的情况下,这是特别有用的,因为你可以跟踪镜头中的其他平面,并使用它们来反求出三维空间的轨迹。
由于我们做的是3D计算而不是2D平面投影,因此工作流程与通常的平面追踪略有不同。
识别相机移动的类型
为了获得一个好的相机解决方案,你必须首先确定它是什么类型的追踪Mocha pro 能识别计算三种类型的相机情况:
平移,倾斜,缩放 (PTZ)
平移,倾斜。变焦相机通常固定在原位,并按照名称的名称进行操作;平移,倾斜和缩放。
PTZ摄像机正在寻找摄像机平面上的整体运动,而不是在场景内的物理平面发生变化。
小视差
小视差是摄像机不固定在空间中的一个点上,并且有很多可以跟踪的中地面平面。
大视差
大视差是相机不固定在空间场景中的一个点,并且可跟踪的平面非常靠近相机。它被称为大视差,因为更近的物体在远离摄像机的位置移动的距离远远超过远处的物体。
相机解算过程
一旦确定了相机的动作类型,就可以开始跟踪拍摄好的素材。
跟踪PTZ型相机解决方案
PTZ解决方案与解决方案有点不同,因为它们只需要查看相机在固定时的行为方式,例如相机是在三脚架。
要设置PTZ解决方案,请执行以下步骤:
- 找到可以追踪的镜头中的大片区域。如果找不到一个大区域,也可以使用( “Add Spline To Layer”)“将样条线添加到图层”来使用各种较小的区域。
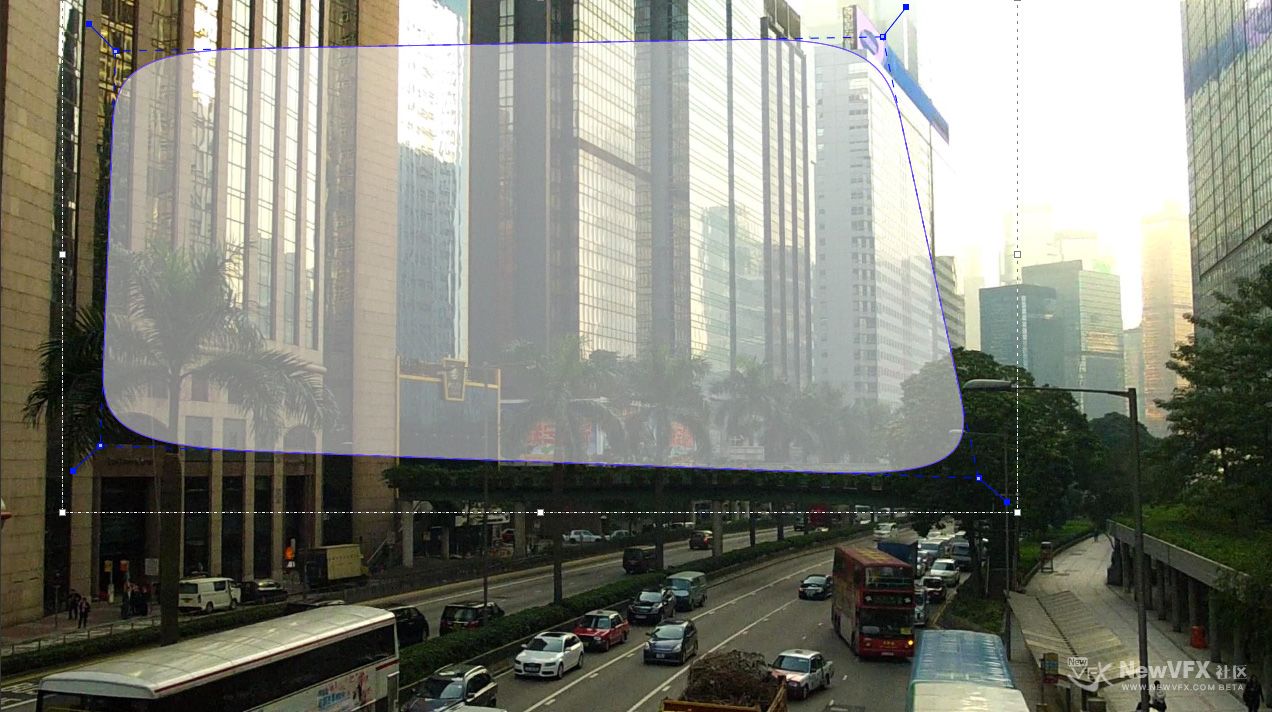
- 打开平面网格,以便看到平面如何移动。
- 为追踪设置所需的任何参数并开始追踪。
- 如果您的追踪绕过60度左右,请停止追踪并创建另一个形状以继续跟踪。第二个形状将需要比第一个形状停止跟踪的位置开始时间更早,也就是让他们的跟踪信息在时间线上重叠。这将有助于解算器将多个形状的跟踪信息混合在一起解算,使断层的地方也能准确追踪。
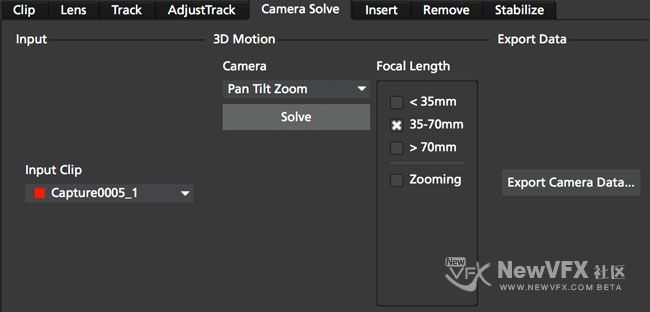
- 一旦你完成了追踪,切换到Camera Solve选项卡。
- 选择您希望用于解算摄像机轨迹的的所有跟踪追踪层
- 选择自动让Mocha自动选择正确的解决方案,或从下拉菜单中选择平移,倾斜,缩放。
- 如果您选择平移,倾斜,缩放,请设置焦距。最常见的是35-70毫米。如果焦距改变,您可以选择多个。如果任何相机推拉拍摄,也请选择缩放。
- 一旦你选择了你的设置,点击解算。
一旦摩卡完成摄像机解算,你可以导出解决的场景。有关更多详细信息,请参见下面的“导出相机解决方案”。
跟踪小视差相机解决方案
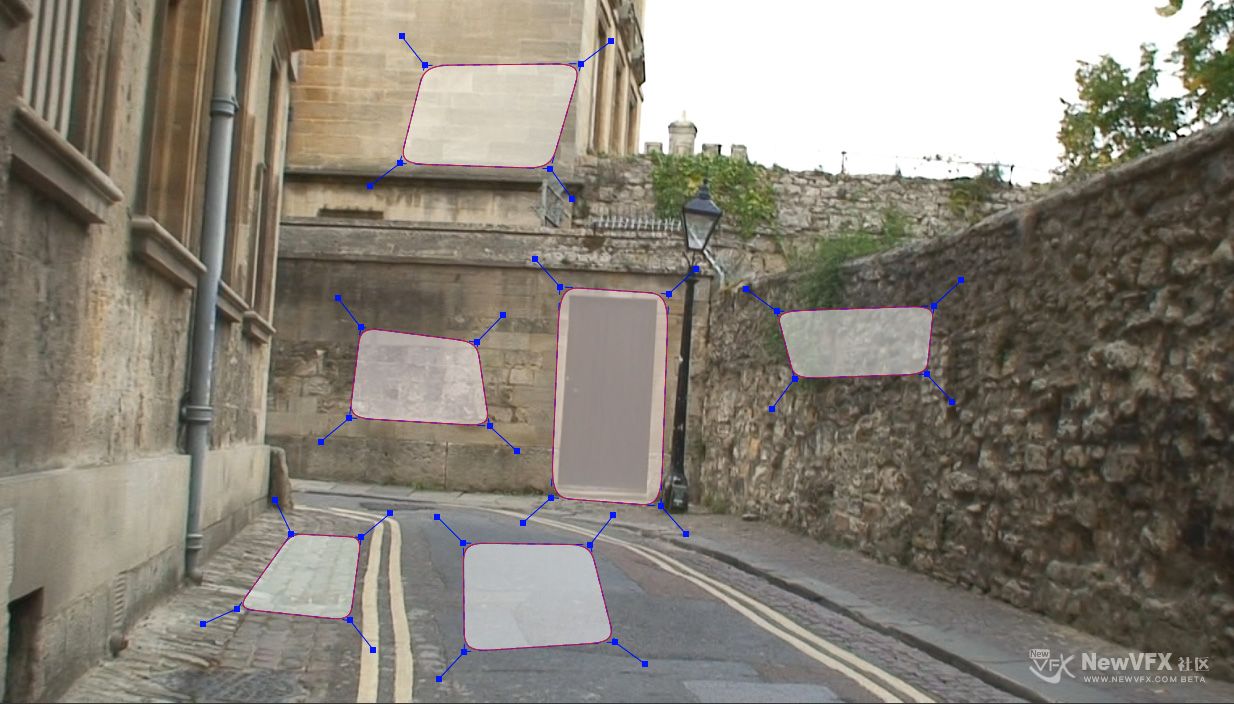
小视差镜头需要至少2个非共面追踪来解决场景。非共面意味着不在同一平面上。非共面区域的例子包括:
- 一个地板和一面墙
- 卡车的侧面和后面
- 两个面向摄像机的区域距离摄像机明显不同,例如一个建筑物位于另一个建筑物的前面
- 两个山坡在不同的角度
- 走廊的两个相对的墙壁
要设置小视差求解,请执行以下步骤:
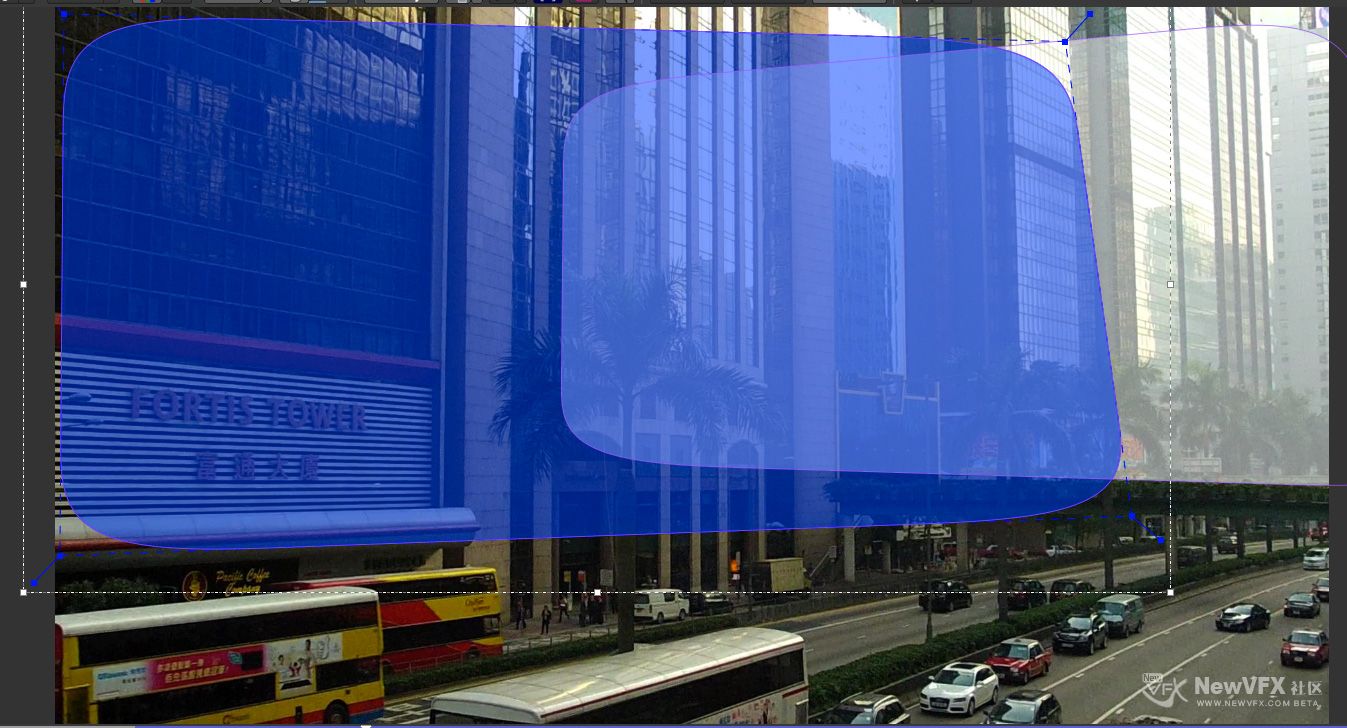
- 找出可以追踪的镜头中间的平面区域。这些物体不应该在镜头中移动,因此请选择墙壁,地面,树干等区域。选择的平面离摄像机太近或太远可能无助于小视差解算。
- 打开网格视图,以便看到平面如何移动。如果您需要更精确地查看此运动,请调整曲面以适应平面透视
- 为追踪设置所需的任何参数并开始追踪。
- 如果由于障碍物或物体移出屏幕而丢失追踪,请停止追踪并创建另一个形状以继续跟踪。第二个形状将需要比第一个形状停止跟踪的位置开始时间更早,因此它们的跟踪信息在时间线上重叠。这将有助于解算器将多个形状的跟踪信息混合在一起。
- 一旦你追踪完镜头,切换到Camera Solve选项卡。
- 选择您希望用于解决的所有跟踪层
- 选择自动让Mocha自动选择正确的解决方案,或者从下拉菜单中选择小视差。
- 如果您选择小视差,请设置焦距。最常见的是35-70毫米。如果焦距改变,您可以选择多个。如果任何相机放大拍摄,也请选择缩放。
- 一旦你选择了你的设置,点击解算。
一旦Mocha完成镜头解算,你可以导出解算好的场景。有关更多详细信息,请参见下面的“导出相机解决方案”。
跟踪大视差相机解决方案
像小视差一样,大视差镜头也需要至少2个非共面轨迹来解决场景。 (参见上面的非共面区域的例子)
要设置大视差求解,请执行以下步骤:
- 找到可以跟踪的镜头中的平面区域。这些物体不应该在镜头中移动,因此请选择墙壁,地面,树干等区域。
- 打开网格显示,以便看到平面是如何移动的。如果您需要更精确地查看此运动,请调整曲面以适应平面透视
- 为追踪设置所需的任何参数并开始追踪。
- 如果由于障碍物或物体移出屏幕而不能追踪,请停止追踪并创建另一个形状以继续跟踪。第二个形状将需要比第一个形状停止跟踪的位置开始时间更早,因此它们的跟踪信息在时间线上重叠。这将有助于解算器将多个形状的跟踪信息混合在一起。
- 一旦你追踪完镜头,切换到Camera Solve选项卡。
- 选择您希望用于解决的所有跟踪层
- Choose either Auto to let mocha guess the right solve, or choose Large Parallaxfrom the drop-down.
- 如果您选择大视差,请设置焦距。最常见的是35-70毫米。如果焦距改变,您可以选择多个。如果任何相机推拉拍摄,也请选择缩放。
- 一旦你选择了你的设置,点击解算。
一旦Mocha完成解算镜头,你可以导出解决的场景。有关更多详细信息,请参见下面的“导出相机解决方案”。
摄像机解算质量指标
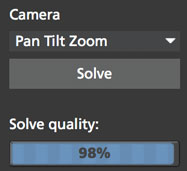
解算完成后,“解算质量”栏会告诉您解决方案的准确程度。如果您得到的百分比检查不准确,以确保您的追踪准确锁定,或请添加其他图层以帮助解算器或尝试不同的求解类型或焦距设置,来提升解算质量结果。
